V-22 Osprey Project - A Few Steps Forward and Major Design Flaw
With the Coronavirus shutting down everything since my last post, I've made significant progress on the V-22 project. After the last post, I created a foamboard profile of the Osprey and was able to hover the craft around the yard successfully.




With basic hovering out of the way, I started fine-tuning the CAD drawings for the tilt mechanism. Other folks have used multiple servos to control the tilt of VTOL motors. Tom Stanton used a gearing mechanism with a servo at each wing-tip to rotate the props on his fixed-pitch VTOL. The folks at Rotormast used a custom servo at each wingtip to operate a rack and pinion system. The servo was modified to use an external potentiometer. There is a gear on the rotation shaft that actuates the potentiometer through the 90-degree travel while the servo's rack and pinion system can gain additional torque through several rotations. I didn't have sufficiently strong servos on hand to handle the torque required to rotate the heavy rotors. I did have a standard size digital high torque servo on hand from my Sbach 342 build, so I designed a system that would utilize a single servo.

The design consisted of the servo at the wing root driving a translation horn through the 90-degree travel. The translation horn was connected via a dual-linkage system to the servo. The main shaft handled the transition to the wing through a U-joint. The Osprey has about 4.4 degrees of dihedral and 6 degrees forward sweep to the wings. Closer to the wingtip, the small 4mm shaft was connected to a 12mm aluminum tube via a 3d printed coupler with 2mm bolts pinned through the aluminum, plastic, and steel shafts. At the rotor end, a 3d printed mount connected the aluminum translation tube to the rotor body. Each of the shaft points was supported via bearings in the wing ribs.
All seemed to be going good and I built the right wing with a combination of the mechanics, 3d printed ribs, carbon fiber, and balsa components. The 3d printed center wing block connected the wing to the driving servo.



During the initial tests of the servo, though, it was immediately apparent that this would not work for a flying model. There was significant slop in the torque tube setup, specifically in the U-joint and translation horn. This slop would undoubtedly cause uncontrollable oscillations in flight. I needed to go back to the drawing board and change to a dual-servo configuration.
Without any appropriate servos on hand, I studied various sources for a while longer to select the right servo and design the mechanism that could get optimal torque in the smallest package. Frustration in this process makes that $2000 price tag from Rotormast more attractive! Finally, I settled on a pair of Hitec D85MG servos from ServoCity. These are high-torque metal gear digital miniature servos. They're slightly bigger than the cheap 9-gram servos I use for most of my foamies, but these really pack a punch!
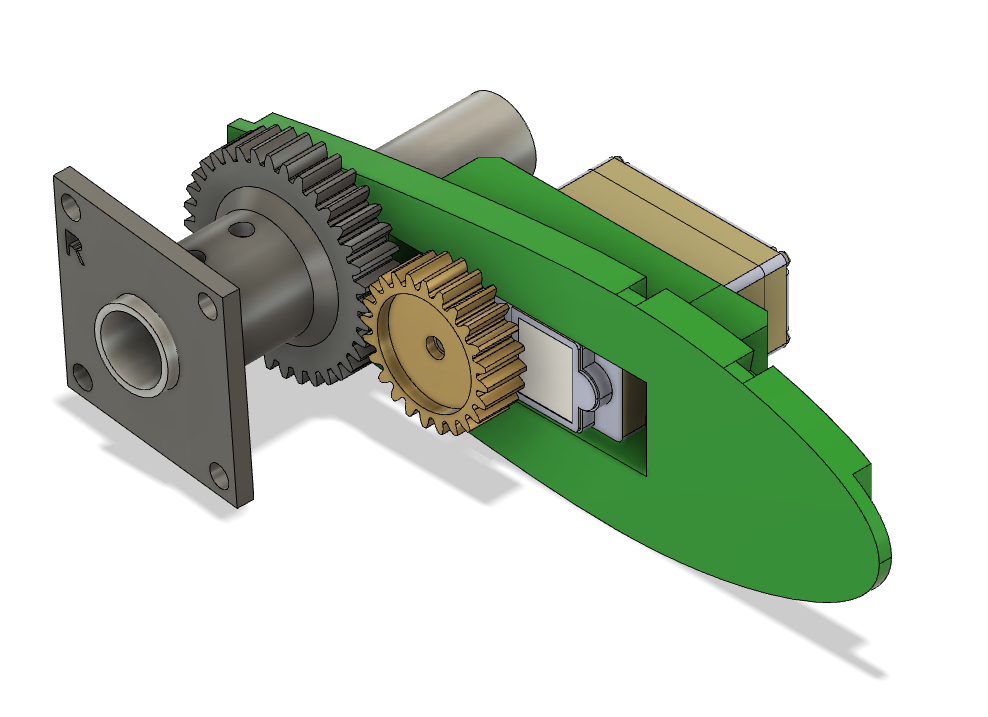
I redesigned the wingtip mount and recessed the servo to maximize the clearance between the translation gears and the main rotor gears. I added a tension screw to maintain full engagement with the gears and keep everything tight and free of backlash. I also designed this piece so that hopefully I can gently cut the old rib free and glue this one in with minimal damage to the hard work I put into the previous wing.
 With the servos and gears on hand, I performed a few tests just holding the mount and the movement feels much more secure than the previous design. I'll graft this onto the wing and see how well it works as part of the greater model.
With the servos and gears on hand, I performed a few tests just holding the mount and the movement feels much more secure than the previous design. I'll graft this onto the wing and see how well it works as part of the greater model.




With basic hovering out of the way, I started fine-tuning the CAD drawings for the tilt mechanism. Other folks have used multiple servos to control the tilt of VTOL motors. Tom Stanton used a gearing mechanism with a servo at each wing-tip to rotate the props on his fixed-pitch VTOL. The folks at Rotormast used a custom servo at each wingtip to operate a rack and pinion system. The servo was modified to use an external potentiometer. There is a gear on the rotation shaft that actuates the potentiometer through the 90-degree travel while the servo's rack and pinion system can gain additional torque through several rotations. I didn't have sufficiently strong servos on hand to handle the torque required to rotate the heavy rotors. I did have a standard size digital high torque servo on hand from my Sbach 342 build, so I designed a system that would utilize a single servo.

The design consisted of the servo at the wing root driving a translation horn through the 90-degree travel. The translation horn was connected via a dual-linkage system to the servo. The main shaft handled the transition to the wing through a U-joint. The Osprey has about 4.4 degrees of dihedral and 6 degrees forward sweep to the wings. Closer to the wingtip, the small 4mm shaft was connected to a 12mm aluminum tube via a 3d printed coupler with 2mm bolts pinned through the aluminum, plastic, and steel shafts. At the rotor end, a 3d printed mount connected the aluminum translation tube to the rotor body. Each of the shaft points was supported via bearings in the wing ribs.
All seemed to be going good and I built the right wing with a combination of the mechanics, 3d printed ribs, carbon fiber, and balsa components. The 3d printed center wing block connected the wing to the driving servo.



During the initial tests of the servo, though, it was immediately apparent that this would not work for a flying model. There was significant slop in the torque tube setup, specifically in the U-joint and translation horn. This slop would undoubtedly cause uncontrollable oscillations in flight. I needed to go back to the drawing board and change to a dual-servo configuration.
Without any appropriate servos on hand, I studied various sources for a while longer to select the right servo and design the mechanism that could get optimal torque in the smallest package. Frustration in this process makes that $2000 price tag from Rotormast more attractive! Finally, I settled on a pair of Hitec D85MG servos from ServoCity. These are high-torque metal gear digital miniature servos. They're slightly bigger than the cheap 9-gram servos I use for most of my foamies, but these really pack a punch!
I redesigned the wingtip mount and recessed the servo to maximize the clearance between the translation gears and the main rotor gears. I added a tension screw to maintain full engagement with the gears and keep everything tight and free of backlash. I also designed this piece so that hopefully I can gently cut the old rib free and glue this one in with minimal damage to the hard work I put into the previous wing.


Comments
Post a Comment